I am a passionate and driven individual with a Master of Science degree in Mechatronics and Robotics.
My fascination with technology, combined with my strong interest in the automotive industry, has led
me to pursue a career where I can merge these two worlds and contribute to the advancement of autonomous
vehicles and smart transportation systems.
Anirudh Addagada
Throughout my academic and professional career, I have been fascinated by the intersection of Mechatronics and Robotics
with the automotive industry. I am particularly interested in how intelligent systems can be used to create safer, more efficient,
and more innovative automobiles.
As an engineer with a specialization in Mechatronics and Robotics and background in Mechanical Engineering, I have developed a deep understanding of the principles of motion
control, sensor technology, and autonomous navigation. I have also gained practical experience in designing and building systems
that can quickly move, stop, and navigate in a variety of environments.
In this portfolio, you will find examples of my work that demonstrate my expertise in Mechatronics, Robotics,
and Automotive Engineering. From developing simple line following robots, to conducting research on
Wi-Fi based SLAM systems, I have consistently demonstrated a passion for innovation, problem-solving,
and cutting-edge technology.
Developed and taught a hands-on Automatic Controls Lab course for undergraduate students, covering experiments involving DC motors, Coupled water tanks, Maglev system using, and Rotary inverted pendulum.
Provided individualized support to students during lab sessions to ensure their understanding of key concepts and successful completion of experiments.
Maintained equipment and materials necessary for experiments, ensuring a smooth and efficient learning experience for students.
Led a team of 3 to develop a lightweight and compact braking system using end pivot Master Cylinders and a
trunnion design biasing bar.
Designed the braking system resulting in a 78% reduction of weight and shortened chassis overhang.
Part of the cost and manufacturing team responsible for keeping track of all individual parts in the vehicle.
Performed iterative design optimization on previous generation uprights and hubs targeting reduced unsprung mass
with a reasonable factor of safety.
Projects
Indoor SLAM using Wi-Fi FTM protocol
This project is a solution for indoor localization using the new Wi-Fi FTM protocol standardized in 2016.
By leveraging ambient Wi-Fi signals and creating a map of the locations of the access points, this system can be used
to help users navigate indoor spaces with ease and precision. Whether it is through a large office building, a shopping
mall, an airport, or even a home this technology. This system can also be used to locate at risk individuals in indoor
environments.
One Shot Full Body Texture Completion
The "One Shot Full Body Texture Completion">
project is a deep learning model that generates a
full body texture in UV space with a single frontal image as input. This model allows for subject and domain
randomization while training vision-based models for various projects. By training the model to complete textures,
it enables faster progress in projects where a huge amounts of human data is required by replacing human data with
racially diverse synthetic data.
Iterative LQR on 2D quadrotor
The "Iterative LQR on 2D quadrotor" project involved implementing Linear Quadratic Regulator (LQR),
infinite horizon LQR, and iterative LQR (iLQR) algorithms on a 2D quadcopter. The main objective was to develop
controllers that could perform trajectory tracking and aerobatic stunt tasks. This project helped in developing
an understanding of how to model cost functions and optimize them for a specific task. The iterative LQR algorithm
was particularly useful in achieving better control of the quadrotor, allowing for more complex maneuvers and stunts.
Recursive state estimation of quadrotor
Undertaking a comprehensive exploration of sensor fusion, the 'Comparative Analysis of EKF and UKF
for Quadrotor State Estimation' project meticulously investigates the performance of the Extended Kalman Filter (EKF)
and Unscented Kalman Filter (UKF) in the context of fusing IMU and camera data for precise quadrotor state estimation.
Through rigorous experimentation, this project dissects the strengths and limitations of each filtering technique in
managing noise, nonlinearity, and uncertainties inherent to dynamic aerial motion. The analysis sheds light on the
delicate trade-off between estimation accuracy and computational complexity, providing essential insights for optimal
decision-making in aerial robotics, autonomous navigation, and real-time sensor integration.
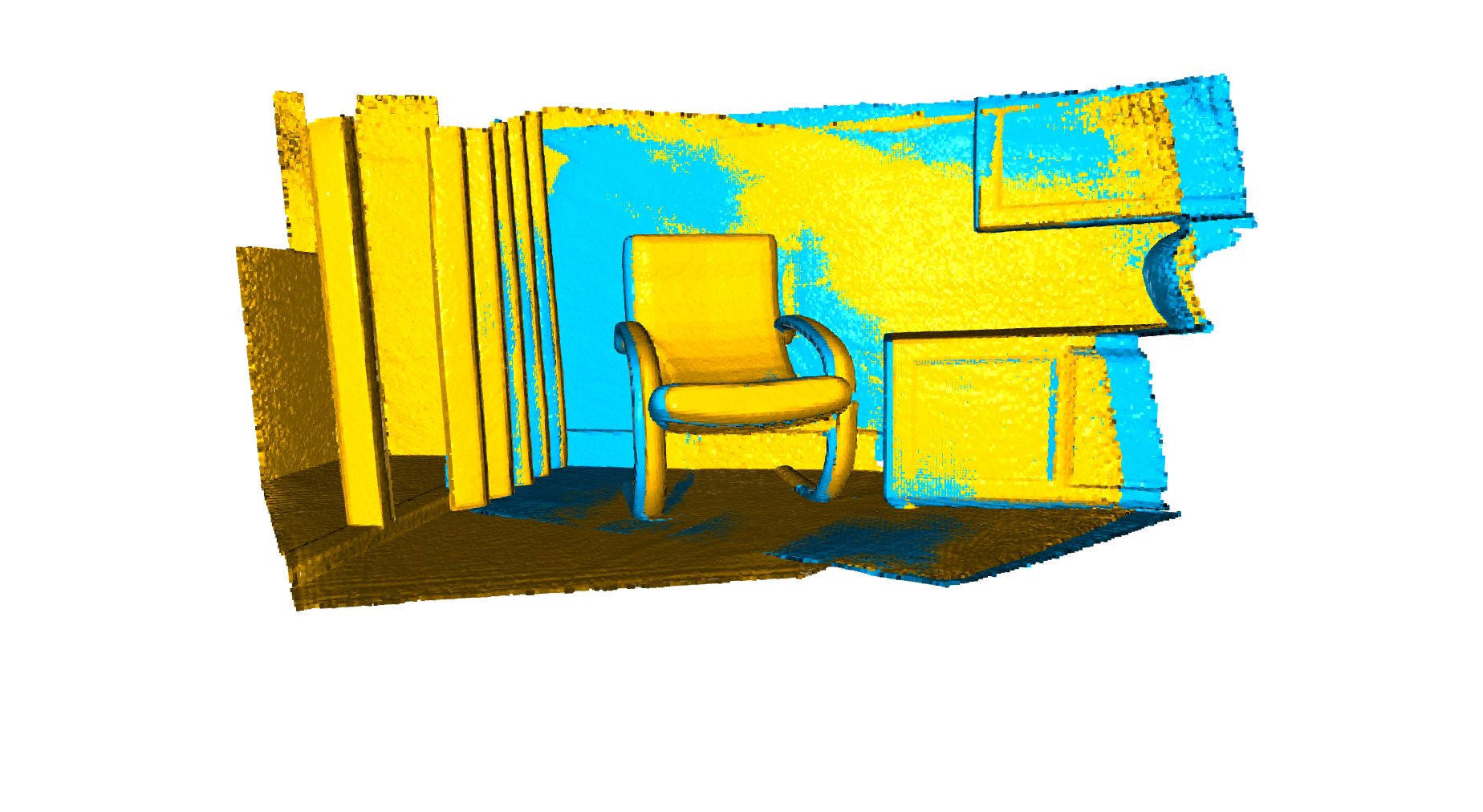
Iterative Closest Point registration
The "Iterative Closest Point registration" project involved implementing the point to point version of
the Iterative Closest Point (ICP) algorithm and benchmarking its performance on both sparse and dense point cloud data.
The ICP algorithm is commonly used in computer vision and robotics to align two point clouds and find the transformation
between them. By iteratively minimizing the distance between corresponding points in the two point clouds, the ICP
algorithm can accurately register the two point clouds. This project helped in improving the accuracy and robustness
of point cloud registration and provided insights into the performance of the algorithm on different types of point
cloud data. The results of this project can be useful in applications such as 3D scanning, object recognition, and robotics.
Visual Place Recognition
The Visual Place Recognition project navigates the dynamic landscape of computer vision, focusing on the
captivating realm of recognizing and memorizing locations through visual cues. Employing state-of-the-art techniques in
image analysis, pattern recognition, and spatial understanding, this project orchestrates innovative solutions that bridge
the gap between visual perception and artificial intelligence. By harnessing the power of machines to identify familiar
places from imagery, akin to human recognition, the project unlocks a multitude of applications in fields like autonomous
navigation, augmented reality, and environmental mapping. Through meticulous exploration and experimentation, this project
not only advances the frontiers of visual place recognition but also offers invaluable insights into enhancing spatial
awareness in AI systems.
Q-Learning on motor actuated inverted pendulum
Embarking on the intriguing domain of reinforcement learning, the 'Q-Learning on a Motor Actuated Inverted
Pendulum' project undertakes the challenge of stabilizing and controlling an inverted pendulum using the principles of
Q-learning. By ingeniously merging control theory with machine learning, this endeavor seeks to unravel the optimal control
policies that govern the intricate dance of the pendulum atop a motorized pivot. Through iterative learning and fine-tuning,
the project strives to attain a harmonious synergy between real-time sensor inputs, swift decision-making, and precise motor
actions. As the pendulum gracefully balances through the delicate interplay of algorithmic mastery and mechanical finesse,
this project extends its implications to diverse fields such as robotics, automation, and adaptive control systems.
Indoor SLAM using Wi-Fi FTM protocol
This system is built using ESP32-S2 microcontrollers by Espressif. These dev boards are equipped with the required
hardware to perform Fine Timing Measurement (FTM), which is a technology used in WiFi 6 (802.11ax) to improve the accuracy and
reliability of wireless communications.
FTM works by measuring the time it takes for a wireless signal to travel between two devices. By accurately
measuring this time, FTM can determine the distance between the two devices, which can then be used to improve the performance
of the wireless network. In practical terms, FTM can help improve things like indoor location tracking, as well as enabling more
efficient use of the wireless spectrum by reducing interference and optimizing signal strength.
The following is a snippet of the system mapping the Access Points in real time. The Map information is not
utilized for the mapping. The solid coloured points represent the ground truth location of the APs where as the coloured circles are the mapped estimates.
The system suffers from noise while the tracked subject i.e. person or robot of interset is under motion. It is extremly difficult to model
non-linearities such as, when someone or something moves past the subject or to model temporary temporal changes like displaced firniture. To circumvent these issues
short term tracking is performed by an Inertial Navigation System. To improve the stability of the Wi-Fi system an Extended Kalman FIlter is used with Multilateration
as the measurement model. Finally data from both Wi-Fi system and INS is fused using a swiitching fusion algorithm.
One Shot Full Body Texture Completion
The ability to rapidly generate high fidelity UV
texture maps of individuals that can be used on 3D human
models, bridge the gap existing in scientific research involving
getting pertinent information about humans. This would also
enable people to recreate themselves in digital environments.
Given a frontal image with reasonable information, the body
is segmented into various parts, these segmented parts are
then used to create respective texture maps in UV space. To
retain facial features an extra layer is used along with CNN
to reconstruct the face in 3D, which is then flattened over
predefined layout to form a UV map of the face. The facial
and body's UV map are then combined to create an accurate
representation of a persons texture.
Generated dataset of 3D human models and corresponding UV maps.
Added fabric textures to portions of cloting to avoid overfitting.
Iterative LQR on 2D quadrotor
The quadcopter was modeled as a non-linear system with four degrees of freedom (roll, pitch, x-pos, and y-pos).
The LQR and iLQR algorithms were used to design controllers that could stabilize the quadcopter, track desired trajectories,
and perform aerobatic maneuvers such as flips and rolls.
Tested the controllers in simulation using the Python programming language. The simulation included a variety of tasks,
such as hovering, following a trajectory, and performing stunts. Evaluated the performance of the controllers using metrics
such as tracking error, control effort, and computational efficiency. The project involved several technical challenges,
such as dealing with non-linear dynamics, tuning the controller gains, and optimizing the controllers for performance.
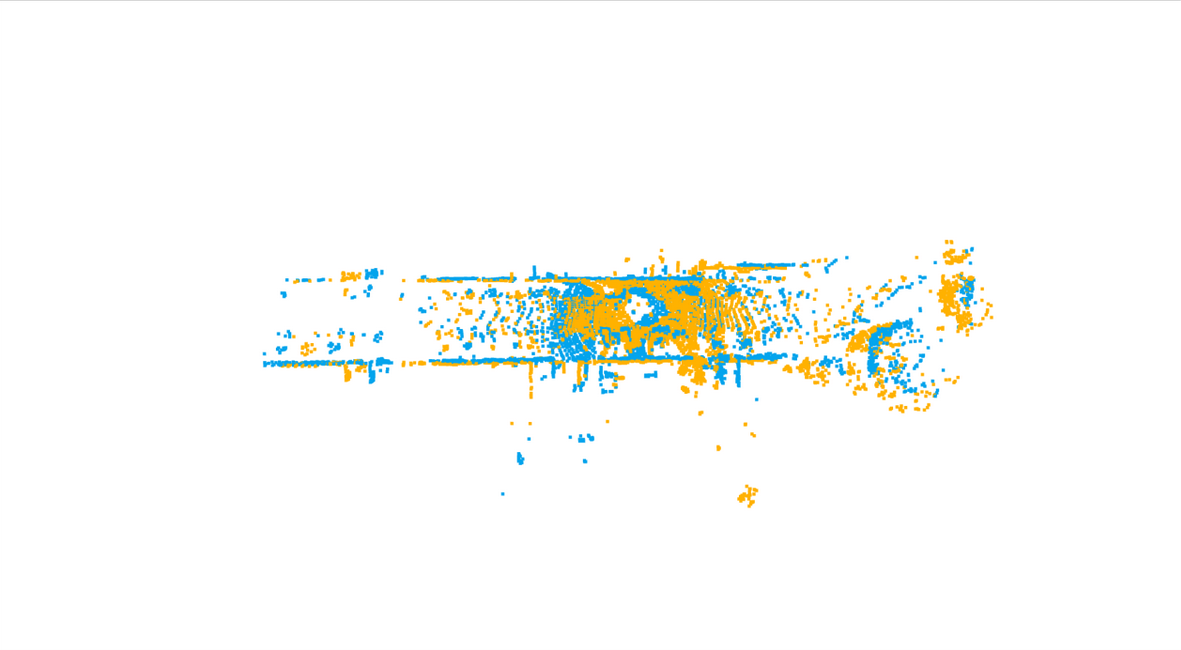
Iterative Closest Point registration
The size and orientation of a Point cloud data captured is rarely the same as the Point cloud map built.
This process needs to happen in real time, hence in the intrest of faster program execution various data structuring
alogrithms can be used. For my implementation k dimensional trees have been used to find correspondences between the
global map and the real time PCD. The homogeneous transform is iteratively computed until the cost function is minimized
The ICP algorithm was tested on a dense 3D LIDAR data from Open3D
as well as sparse 3D LIDAR data from the KITTI dataset.
This is bold and this is strong. This is italic and this is emphasized.
This is superscript text and this is subscript text.
This is underlined and this is code: for (;;) { ... }. Finally, this is a link.
Heading Level 2
Heading Level 3
Heading Level 4
Heading Level 5
Heading Level 6
Blockquote
Fringilla nisl. Donec accumsan interdum nisi, quis tincidunt felis sagittis eget tempus euismod. Vestibulum ante ipsum primis in faucibus vestibulum. Blandit adipiscing eu felis iaculis volutpat ac adipiscing accumsan faucibus. Vestibulum ante ipsum primis in faucibus lorem ipsum dolor sit amet nullam adipiscing eu felis.
Preformatted
i = 0;
while (!deck.isInOrder()) {
print 'Iteration ' + i;
deck.shuffle();
i++;
}
print 'It took ' + i + ' iterations to sort the deck.';